醫療影像分析、小樣本數據工作流與臨床輔助決策。
讓優秀成為習慣,讓習慣變得優秀
林載炘
智能技術碩士在讀 | AI醫療影像與邊緣智能方向
目前就讀於澳門科技大學智能技術專業,關注醫療圖像分析、晶圓缺陷檢測、機器人與邊緣端部署優化,具備從數據處理、模型訓練到部署驗證的完整項目經驗。
晶圓缺陷檢測、安全監測與邊緣端實時推理部署。
ROS/Gazebo 仿真、導航聯調與具身智能系統集成。
持續圍繞 AI 醫療影像、工業視覺與智能系統展開研究。
覆蓋數據處理、模型訓練、邊緣推理與系統聯調驗證。
兼顧算法效果、部署效率與真實場景下的可運行性。
既能展示研究能力,也能承接技術交流與合作機會。
背景簡介
以研究嚴謹性定義問題,以工程閉環驗證結果。
AI 醫療影像
半導體檢測
邊緣部署
機器人系統
教育經歷
教育背景與課程軌跡圍繞智能技術、微電子與工程實現能力展開。
澳門科技大學 · 智能技術 · 工學碩士
中留服認證專業領域:計算機科學與技術(智能技術)
GPA:3.81/4.00
畢業設計:Improved classification method for semiconductor wafer surface defects
主修課程
吉林大學珠海學院 · 微電子科學與工程 · 工學學士
GPA:3.54/4.00 · 加權平均成績:88.36/100.00
畢業設計:基于 Cadence 的高性能運算放大器設計
主修課程
精選項目
聚焦醫療影像、工業檢測與機器人實踐。
 開源項目
開源項目
VisionLabelOps
面向 YOLO / COCO / Labelme 工作流的輕量級視覺資料集工具鏈,聚焦審計、轉換、統計、切分、預覽與報告生成。
- 同時提供 CLI 與 Python API,適合研究與工程中的可腳本化資料處理流程。
- 圍繞 detection-first 資料集治理場景,減少一次性腳本堆積與格式處理碎片化。
- 適用於需要結構化、可重現、輕量整合的資料集審查與轉換任務。
 開源項目
開源項目
我的開源項目02:DepthBatch
基於 Depth Anything V2 推理語義構建的單目深度估計批處理與部署驗證工具鏈,統一 CLI、Python API、ONNX 導出與結構化運行產物。
- 面向圖像、影片與清單輸入提供批量推理流程,並生成 manifest、reports 與結構化運行目錄。
- 圍繞 PyTorch / ONNXRuntime / Transformers / fake 後端分層設計,兼顧本地驗證、CI smoke 與導出校驗。
- 當前處於 v0.1.0-alpha 階段,聚焦 Depth Anything V2 工作流的工程化封裝,而非訓練框架或通用平台。
 開源遊戲
開源遊戲
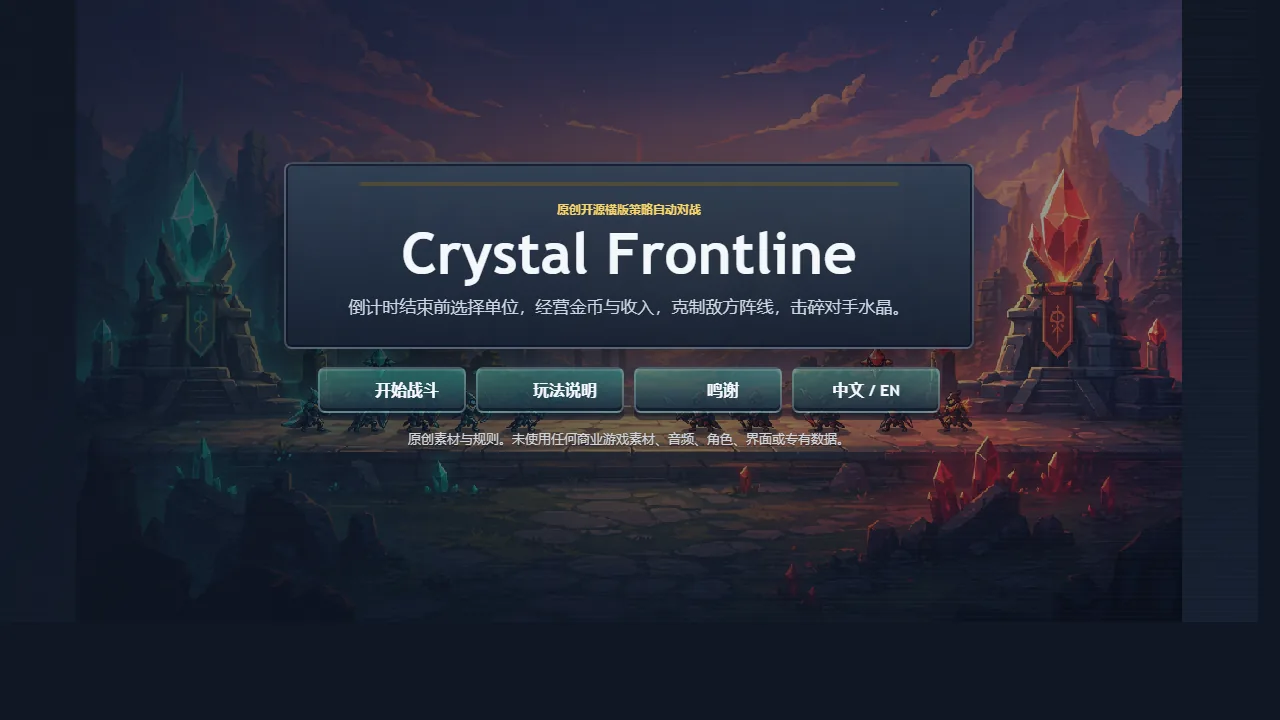
我的開源遊戲01:Crystal Frontline
原創開源橫版策略自動對戰遊戲,圍繞單位選擇、金幣與收入經營、克制對方陣線和擊碎水晶展開。
- 倒計時結束前選擇單位,形成即時決策與資源分配的核心循環。
- 透過經營金幣與收入組織進攻節奏,強調陣線推進和對抗反饋。
- 作為可公開訪問的獨立網頁遊戲部署在 Cloudflare Pages,保留中英文切換入口。
 開源遊戲
開源遊戲
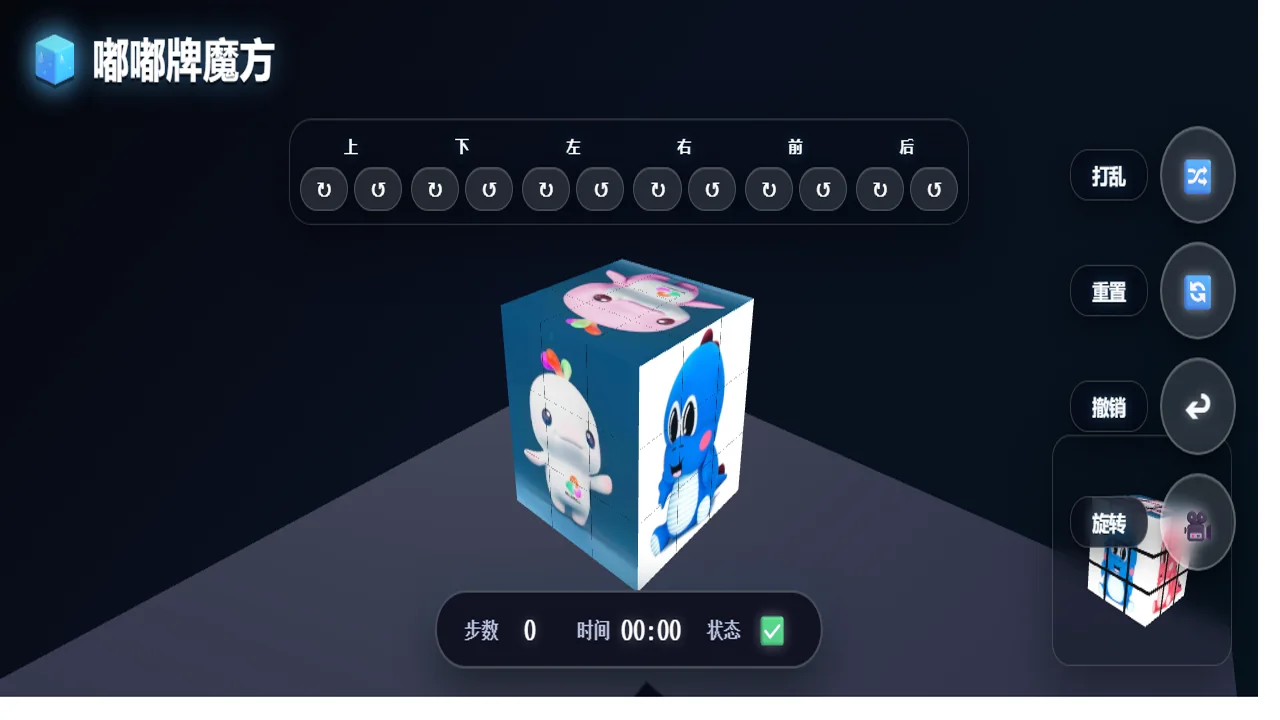
開源遊戲02:3D Rubik's Cube
一個網頁版 3D 魔方互動小遊戲,支援瀏覽器直接遊玩,適合作為個人作品集中展示前端互動、3D 場景和小遊戲設計能力的項目。
- 圍繞魔方旋轉、打亂、重置、撤銷與計時反饋構建輕量級瀏覽器互動體驗。
- 透過 3D 場景承載空間操作和即時反饋,展示前端互動與小遊戲介面組織能力。
- 獨立部署在 Cloudflare Pages,訪問者可從個人網站直接打開並線上試玩。
 Medical AI
Medical AI
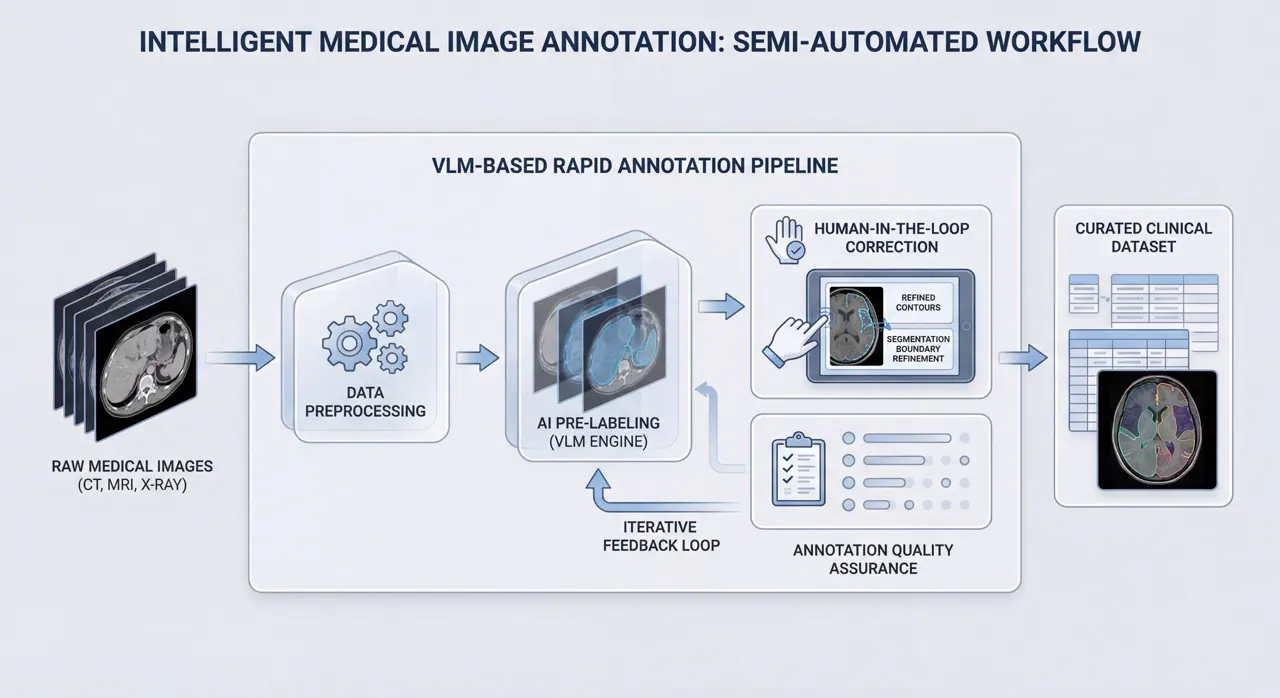
基于視覺語言模型的醫學圖像快速標注工具
面向醫學影像小樣本標注場景,構建“模型預標注 + 人工校正 + 數據回流”的半自動流程,提升標注效率與一致性。
- 完成圖像預處理、標注格式統一與質檢流程。
- 在40+原始樣本上完成初始數據集構建與迭代優化。
- 通過分割細化與人工復核機制降低邊界誤差。
 Clinical Classification
Clinical Classification
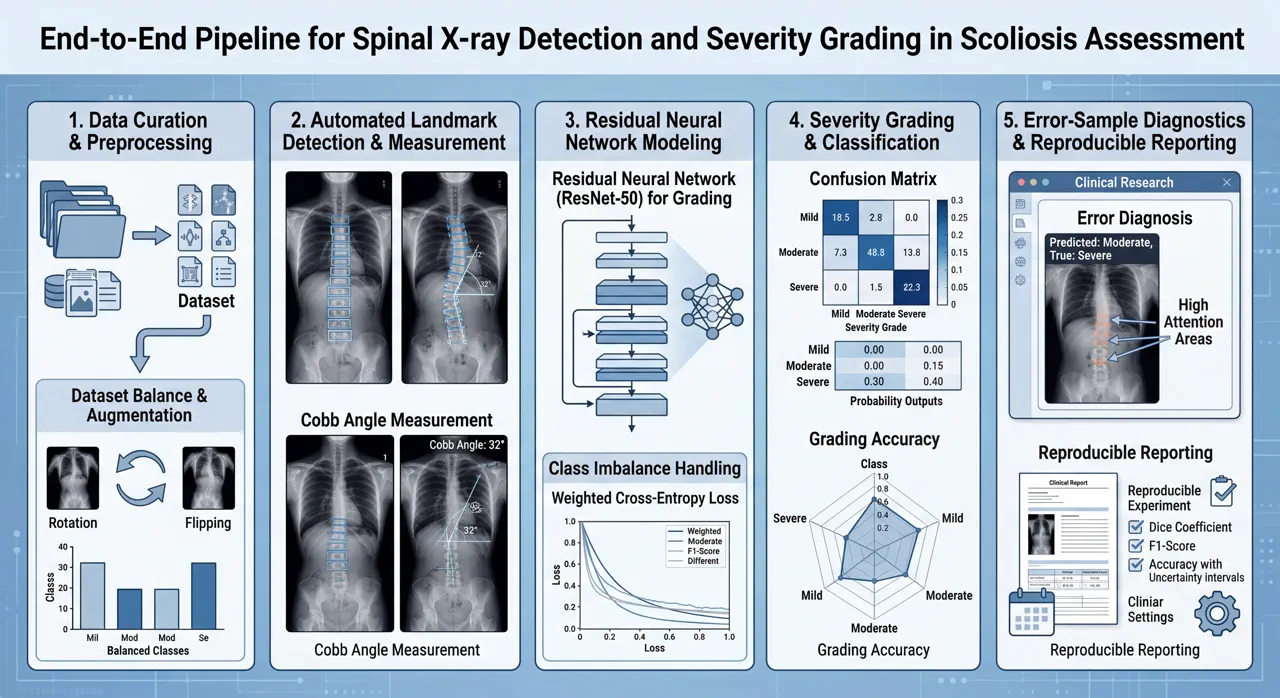
脊柱 X 光片檢測與嚴重程度分級
搭建從數據清洗、樣本劃分到訓練評估的完整實驗鏈路,面向脊柱側彎影像完成分類與分級建模。
- 在傳統 RCN 框架中引入殘差結構,提升深層訓練穩定性。
- 針對類不平衡場景設計訓練策略并進行誤差樣本復盤。
- 形成分級識別報告與可復現實驗流程。
 CAD System
CAD System
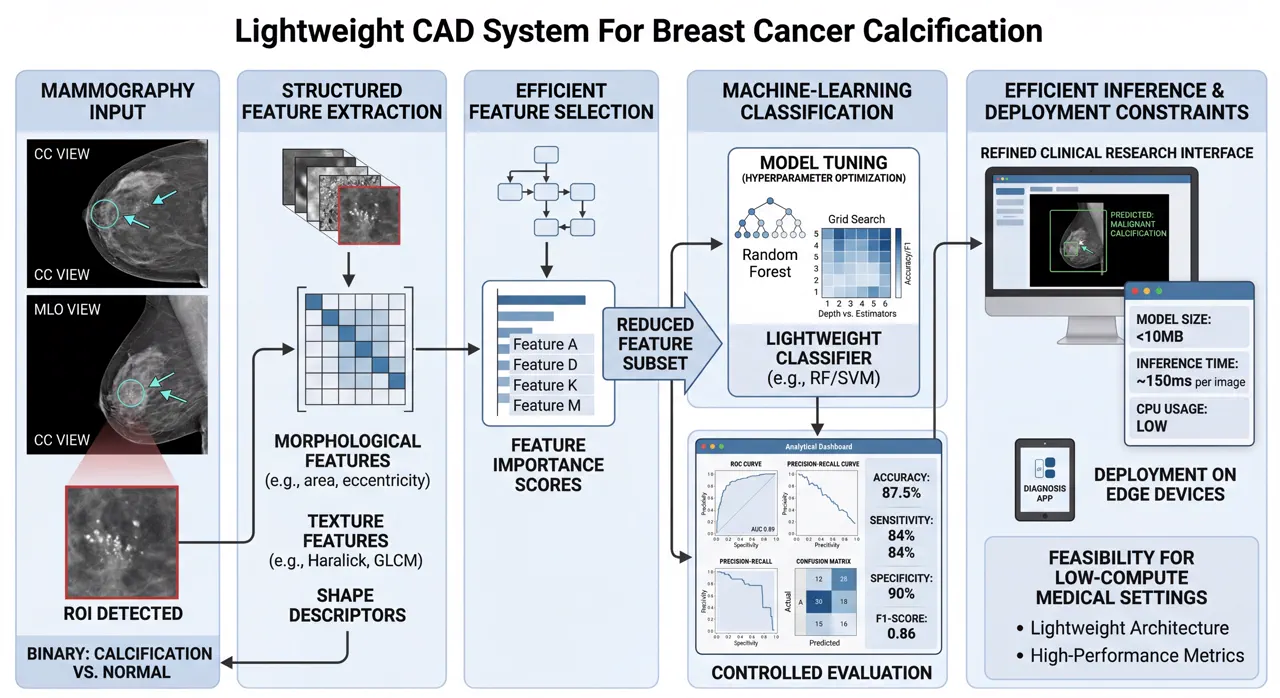
輕量化女性乳腺癌鈣化點輔助診斷系統
基于結構化特征與機器學習二分類模型,面向低算力設備構建可部署的輔助診斷方案。
- 完成特征篩選、參數調優與模型效果評估。
- 最終取得95%分類準確率,兼顧推理效率與可解釋性。
- 參與醫院合作驗證,優化輸入輸出與業務匹配度。
 Industrial Vision
Industrial Vision
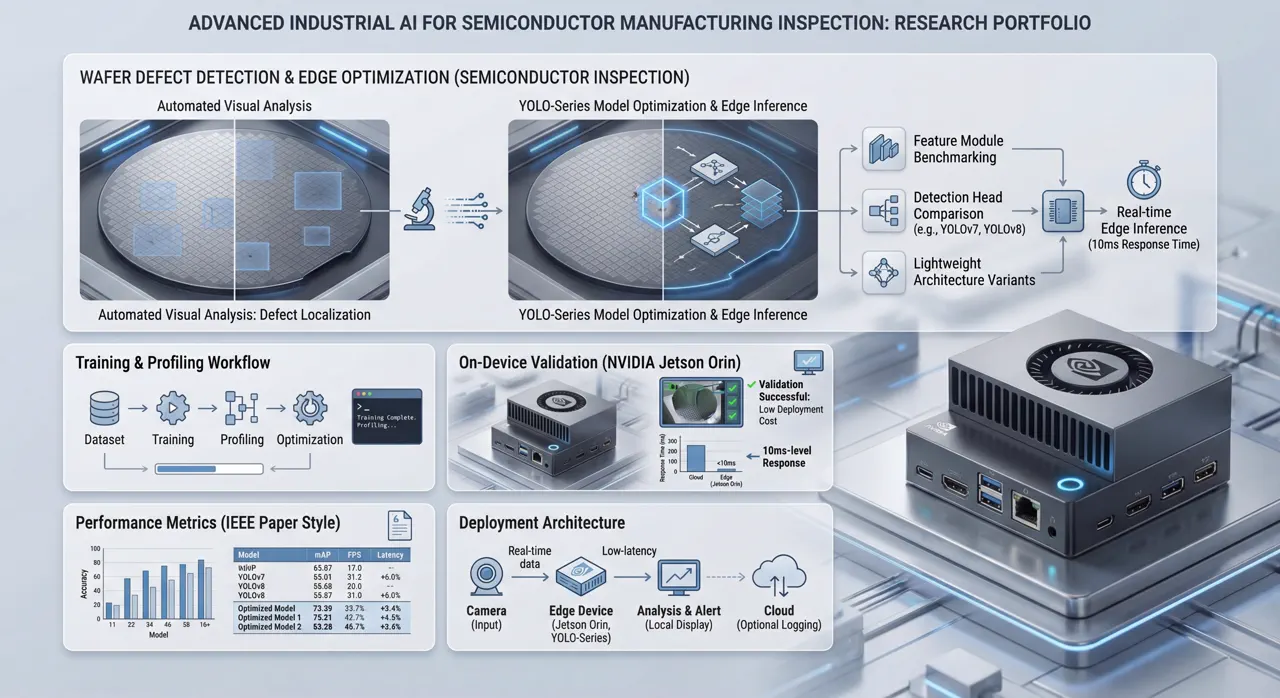
晶圓缺陷檢測與邊緣端部署優化
圍繞工業檢測精度、實時性與部署成本,對 YOLO 系列模型進行結構替換、輕量化與端側驗證。
- 完成多組 benchmark,對比檢測頭、特征模塊與速度指標。
- 負責訓練、推理性能測試與邊緣設備資源占用分析。
- 在 NVIDIA Jetson Orin 實現10ms+級響應,滿足現場實時需求。
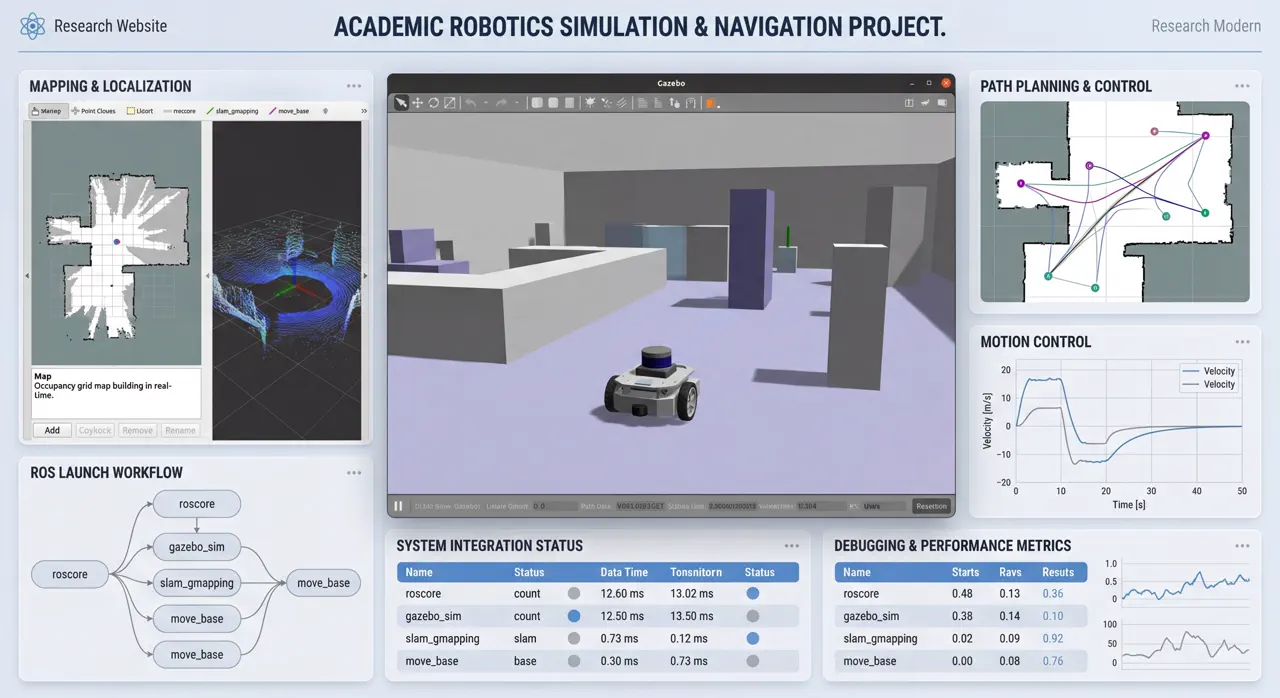 Robotics
Robotics
基于 ROS/Gazebo 的機器人仿真與導航實踐
在 Linux 環境完成機器人建模、傳感器配置、SLAM 建圖與路徑導航實驗,打通從仿真到聯調的完整流程。
- 參與激光雷達點云建圖,理解環境感知與地圖構建流程。
- 完成定位、路徑規劃與運動控制鏈路的參數調試。
- 熟悉 ROS `topic`、`launch`、節點通信與仿真診斷方法。
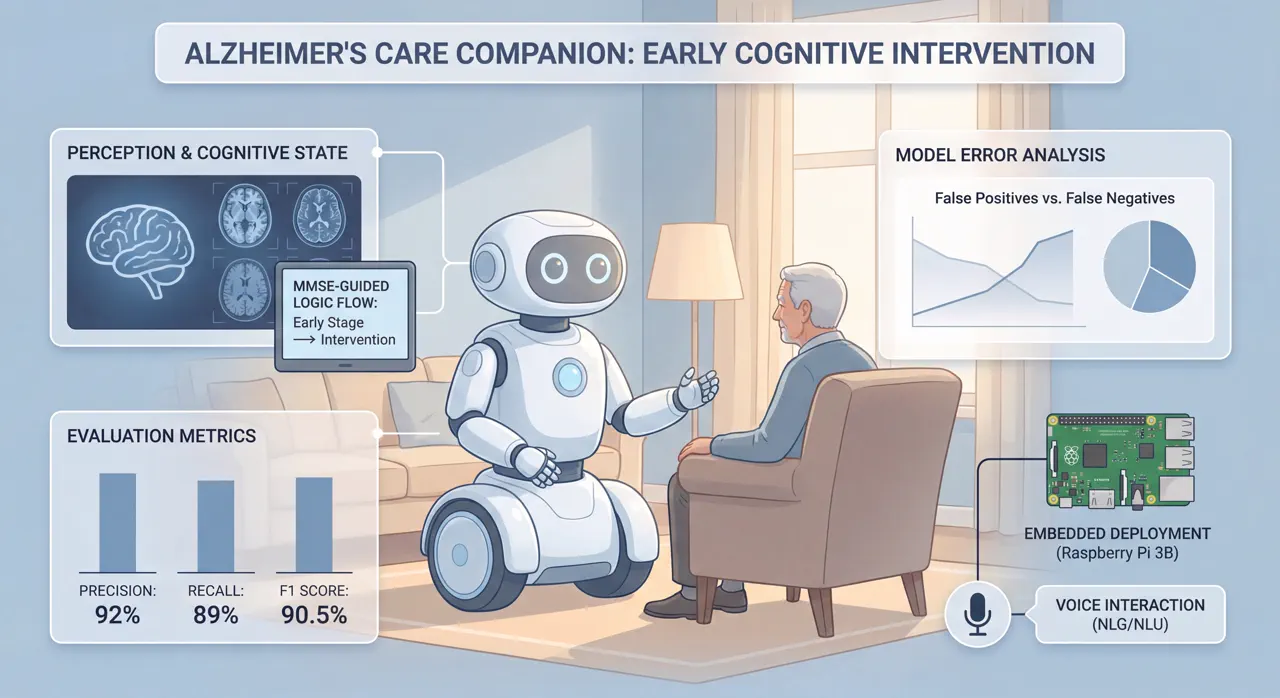 Assistive Robot
Assistive Robot
阿爾茲海默癥陪護機器人項目
面向早期干預與陪伴服務場景,構建“感知評估 + 語音交互 + 陪護服務”協同方案。
- 結合 MMSE 思路對 MRI 數據進行認知狀態識別分析。
- 參與 Precision / Recall / F1 等指標評估與誤差分析。
- 在樹莓派 3B 實現基礎語音交互模塊并完成場景聯調。
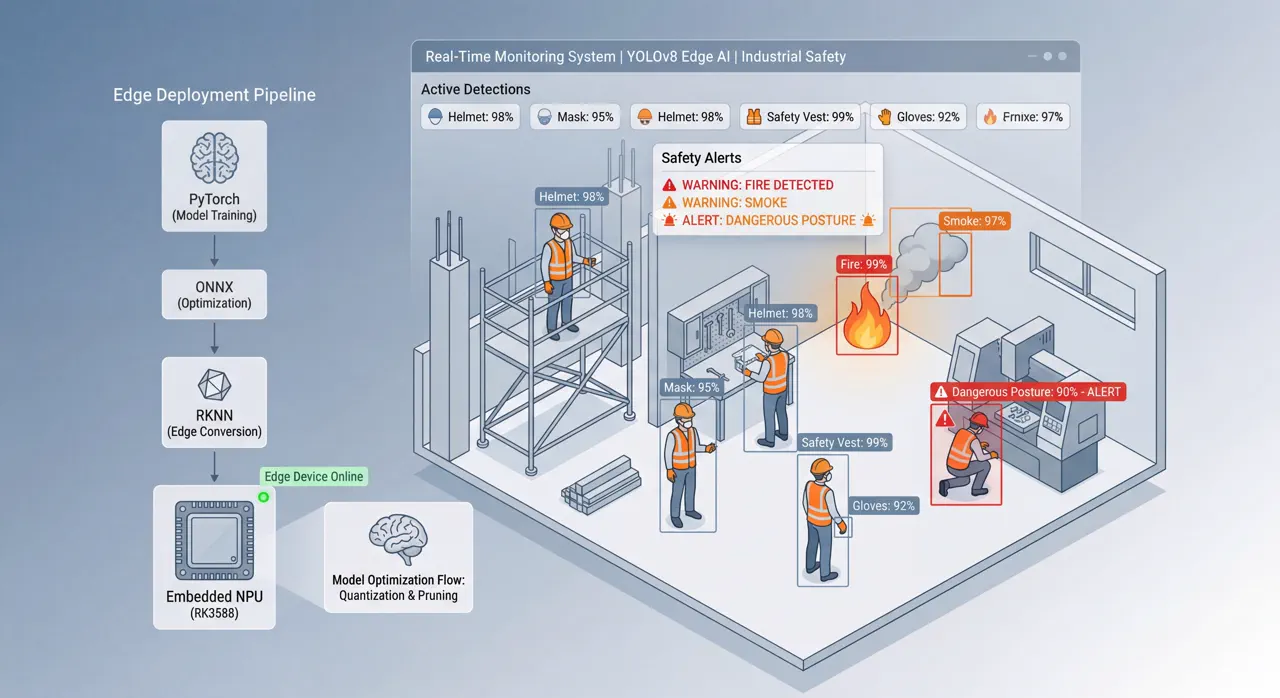 Safety Monitoring
Safety Monitoring
基於 YOLOv8 的工業安全裝備佩戴高精度智能監測系統
面向工地與車間安全監測場景,構建集安全帽、口罩、反光衣、手套識別及火災煙霧、危險姿態預警於一體的邊緣端智能監測方案。
- 完成從數據預處理、模型訓練到部署驗證的工程閉環。
- 結合數據增強、輕量化網絡替換與損失函數優化,提升多類目標識別精度。
- 完成 PyTorch、ONNX 到 RKNN 的模型轉換與量化部署,實現實時推理與告警聯動。
- 在規定任務中 mAP50 達到 0.94,兼顧檢測精度、推理效率與落地能力。
基於 SAM 的課堂學生分割與穩定追蹤
面向固定機位課堂視頻場景,結合學生分割、目標檢測與多目標追蹤,實現每位學生全程身份關聯與軌跡管理。
- 基於 SAM 進行目標分割與區域提取,結合 YOLO 檢測提升密集座位場景定位效果。
- 引入多目標追蹤與時序關聯機制,為每位學生分配唯一 ID 並降低 ID Switch。
- 針對小幅動作、局部遮擋、短時離開後返回等情況,結合座位先驗與軌跡恢復策略提升穩定性。
- 重點優化長時視頻中的身份一致性,提升課堂分析場景可用性。
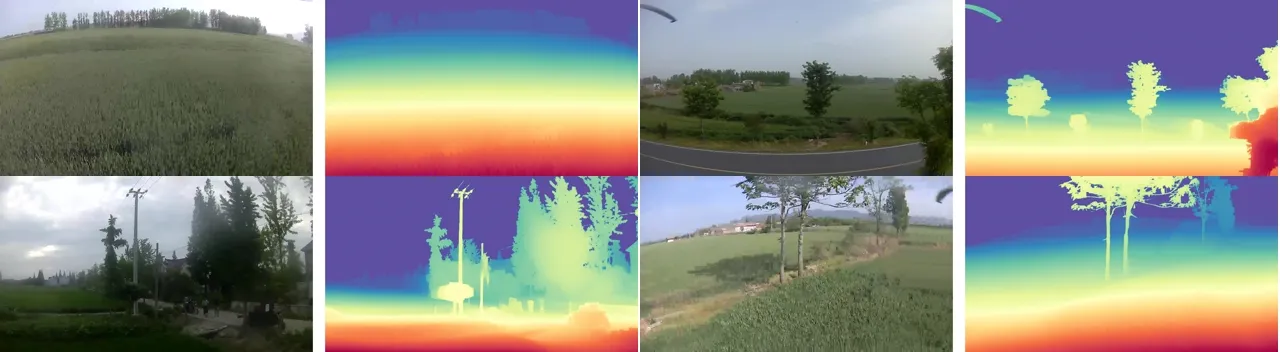 3D Perception
3D Perception
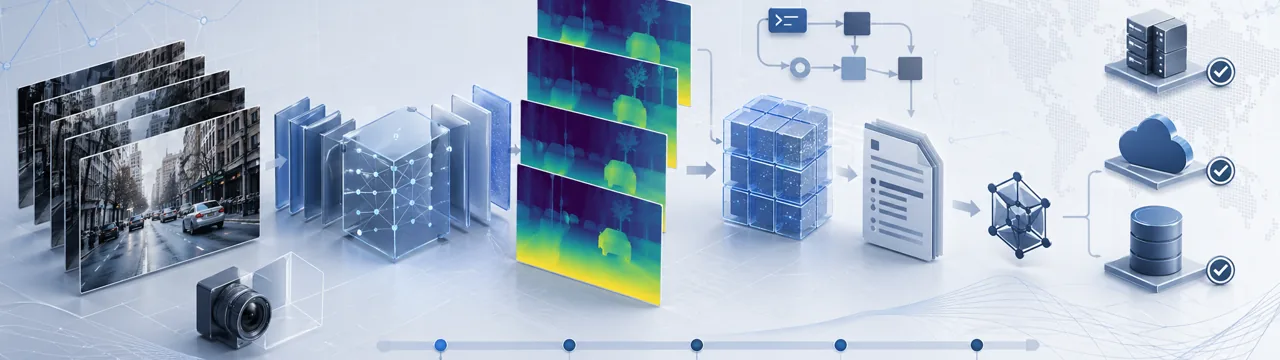
基於 Depth Anything 的單目深度估計與景深資訊可視化實踐
本項目聚焦單目深度估計任務,基於 Depth Anything 實現僅依賴單張 RGB 圖像的場景深度預測與可視化表達,在無需雙目相機、激光雷達或其他額外深度感測器的條件下,恢復場景中的相對深度資訊與空間層次關係。項目體現了單目方案在低成本、易部署、適配性強方面的優勢,可為機器人感知、場景理解與輕量化三維視覺應用提供基礎支撐。
- 僅使用單張 RGB 圖像完成深度估計,突顯單目視覺方案的實用價值。
- 構建圖像輸入、模型推理、深度生成與結果可視化的完整流程。
- 在無雙目與無激光雷達條件下,實現對場景空間結構的直觀表達。
完整表情包
8 images







科研成果
論文、知識產權與可部署系統共同構成學術可信度與工程延展性。
代表論文
- A Bayesian and SVM-based model for compositional analysis and identification of glass artifacts(EI,第一作者)
- Intelligent monitoring model of wearing of industrial safety protective equipment based on YOLOv8 algorithm(EI,第一作者)
- Research on E-commerce Purchase Prediction Model Based on Machine Learning(EI,第一作者)
- Design and Analysis on U-VLC-CC-CDMA Systems(EI,第五作者)
- 《新能源汽車高質量發展》(期刊,第一作者)
- 《基于VR技術的會展模式分析》(期刊,第一作者)
知識產權與軟著
- 集成電路布圖設計登記:BS.245520155、BS.255510705
- 外觀專利:CN307504732S、CN308083643S、CN308095482S
- 實用新型:CN218552339U、CN218602229U、CN221188216U
- 發明專利:CN120451642A
- 軟件著作權:2022SR1148459、2022SR0828685
榮譽、獎學金與競賽
獎學金、學術榮譽與競賽成績形成穩定的外部驗證。
榮譽經歷
- 2024-2025學年:中銀(澳門)獎學金
- 2023-2024學年:國家獎學金、校十佳大學生、優秀畢業生、優秀畢業論文、優秀實習生
- 2022-2023學年:一等獎學金、優秀學生、學術科技創新單項獎學金、校友優秀學生獎學金、綜測專業第一
- 2021-2022學年:二等獎學金、優秀學生、學術科技創新單項獎學金、綜測專業第三
- 2020-2021學年:二等獎學金、學術科技創新單項獎學金、綜測專業第五
競賽經歷(節選)
- 中國大學生計算機設計大賽國賽二等獎(2023)
- 全國大學生集成電路設計大賽省賽三等獎(2023)
- 藍橋杯省賽三等獎(2023)
- 挑戰杯省賽三等獎(2023)
- 互聯網+省賽銅獎(2022)
- 美國大學生數學建模競賽 S 獎(2021)
工具鏈與能力地圖
覆蓋建模、部署、機器人與工程工具鏈,強調從研究到實現的連續性。
技術工具
- AI/ML:YOLO、機器學習建模、醫學影像分析、模型評估
- 工程方向:ROS/Gazebo、Jetson Orin 邊緣部署、IC/EDA 設計
- 軟件工具:Matlab、ModelSim、Quartus Prime、Keil、PSPICE、Altium Designer
- 辦公與媒體:WPS Office、剪映、OBS、Origin
證書
- 工業和嵌入式開發工程師初級(能力一級)
- 跨境電子商務員
- 新媒體運營師
合作與聯繫
主郵箱用於科研合作、實習機會與技術溝通,其餘渠道作為補充聯絡與公開學術主頁。