Medical image analysis, small-sample workflows, and clinically relevant modeling.
Excellence as a Habit
Zaixin Lin
M.Eng. Candidate in Intelligent Technology | AI Medical Imaging & Edge Intelligence
I am currently pursuing a master's degree at Macau University of Science and Technology. My work focuses on medical image analysis, wafer defect detection, robotics, and edge-side AI deployment from data processing to model validation.
Wafer inspection, safety monitoring, and edge-side real-time inference.
ROS/Gazebo simulation, navigation pipelines, and embodied system integration.
Core Projects
Competition Awards
Selected Papers
Patents & IP
Research rigor aligned with deployable engineering
My current work centers on medical image intelligence, industrial visual inspection, and edge deployment optimization, with equal emphasis on reproducible experiments and runnable systems.
Focused on medical AI, industrial vision, and intelligent systems research.
Covering data preparation, training workflows, edge inference, and system validation.
Balancing model quality, runtime efficiency, and real-world deployability.
Positioned as both a research portfolio and a practical collaboration landing page.
Background
Define problems with research discipline and validate them through engineering execution.
Medical Imaging AI
Semiconductor Inspection
Edge Deployment
Robotics Systems
Education
The academic track and coursework align with AI, intelligent systems, and engineering implementation.
Macau University of Science and Technology · M.Eng. in Intelligent Technology
Certified field: Computer Science and Technology (Intelligent Technology)
GPA: 3.81 / 4.00
Thesis: Improved Classification Method for Semiconductor Wafer Surface Defects
Key coursework
Zhuhai College of Jilin University · B.Eng. in Microelectronics Science and Engineering
GPA: 3.54 / 4.00 · Weighted Score: 88.36 / 100.00
Graduation Project: High-Performance Operational Amplifier Design Based on Cadence
Core coursework
Selected Work
Medical AI, industrial vision, and robotic systems.
 Open Source
Open Source
VisionLabelOps
Lightweight dataset tooling for YOLO / COCO / Labelme workflows, focused on audit, conversion, statistics, splitting, preview, and report generation.
- Provides both a CLI and Python API for scriptable, repeatable dataset processing.
- Keeps audit, conversion, statistics, preview, and reporting in one structured workflow for detection-first datasets.
- Fits lightweight, repeatable dataset operations for researchers and engineers working with CV annotations.
 Open Source
Open Source
Open-source Project 02: DepthBatch
A batch-processing and deployment-oriented monocular depth toolchain built around Depth Anything V2, unifying CLI, Python API, ONNX export hooks, and structured run outputs.
- Handles images, videos, and file lists in batch runs, with manifests, reports, and structured run directories.
- Layers PyTorch, ONNXRuntime, Transformers, and fake backends for local validation, CI smoke coverage, and export checks.
- Remains v0.1.0-alpha, focused on engineering the Depth Anything V2 workflow rather than becoming a training framework or general platform.
 Open-source Game
Open-source Game
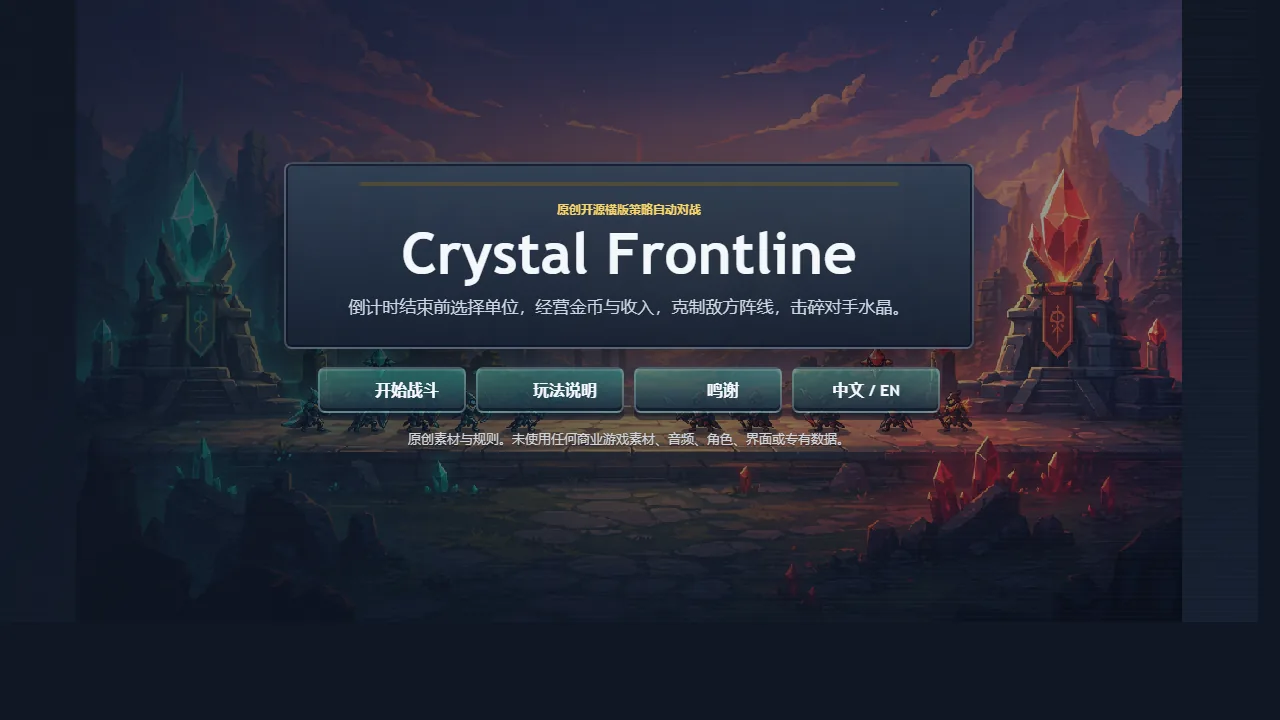
Open-source Game 01: Crystal Frontline
An original open-source lane strategy auto-battler built around unit selection, coin and income management, frontline pressure, and crystal destruction.
- Players select units before the countdown ends, creating a compact loop of timing and resource decisions.
- Coin and income management shape attack pacing, frontline pressure, and tactical counterplay.
- The standalone web game is deployed on Cloudflare Pages and keeps a Chinese / English switch entry.
 Open-source Game
Open-source Game
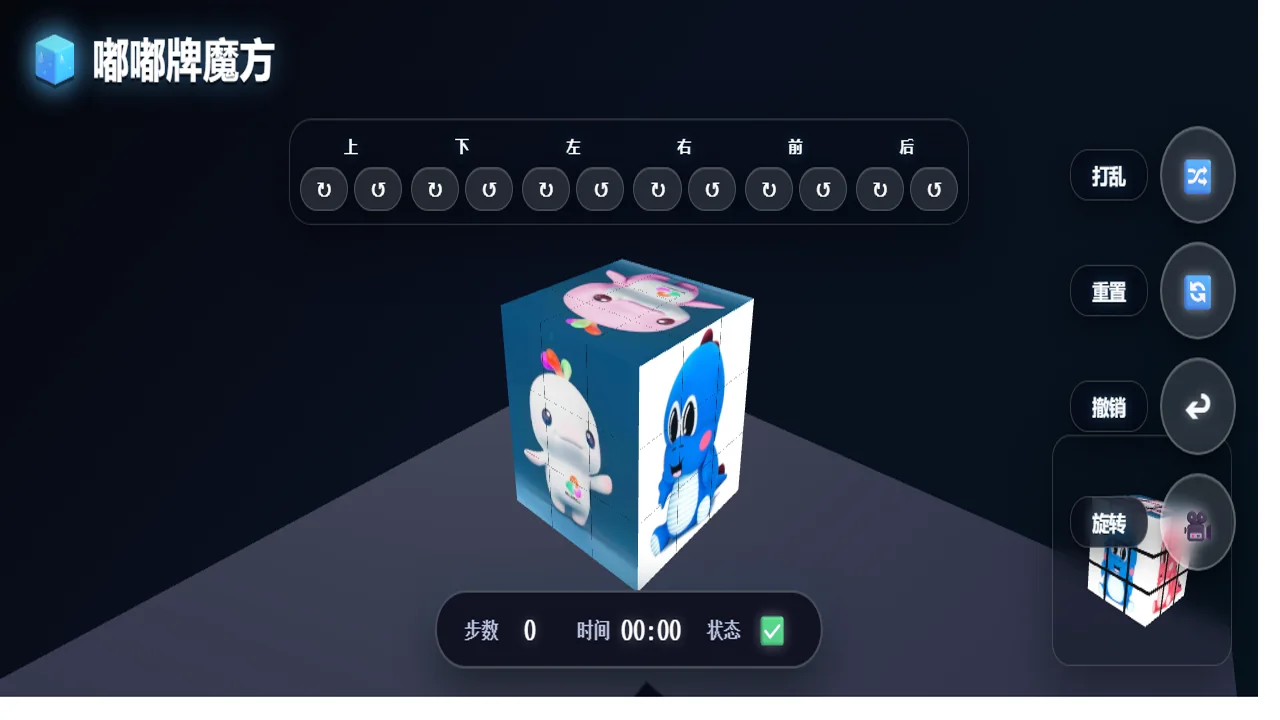
Open-source Game 02: 3D Rubik's Cube
A browser-based 3D Rubik's Cube mini game that can be played directly online, showing front-end interaction, 3D scene work, and lightweight game design.
- Builds a compact browser experience around cube rotation, shuffle, reset, undo, timing, and immediate feedback.
- Uses a 3D scene to express spatial manipulation and game-like interaction within a web portfolio context.
- Independently deployed on Cloudflare Pages so visitors can launch and play it directly from the portfolio.
 Medical AI
Medical AI
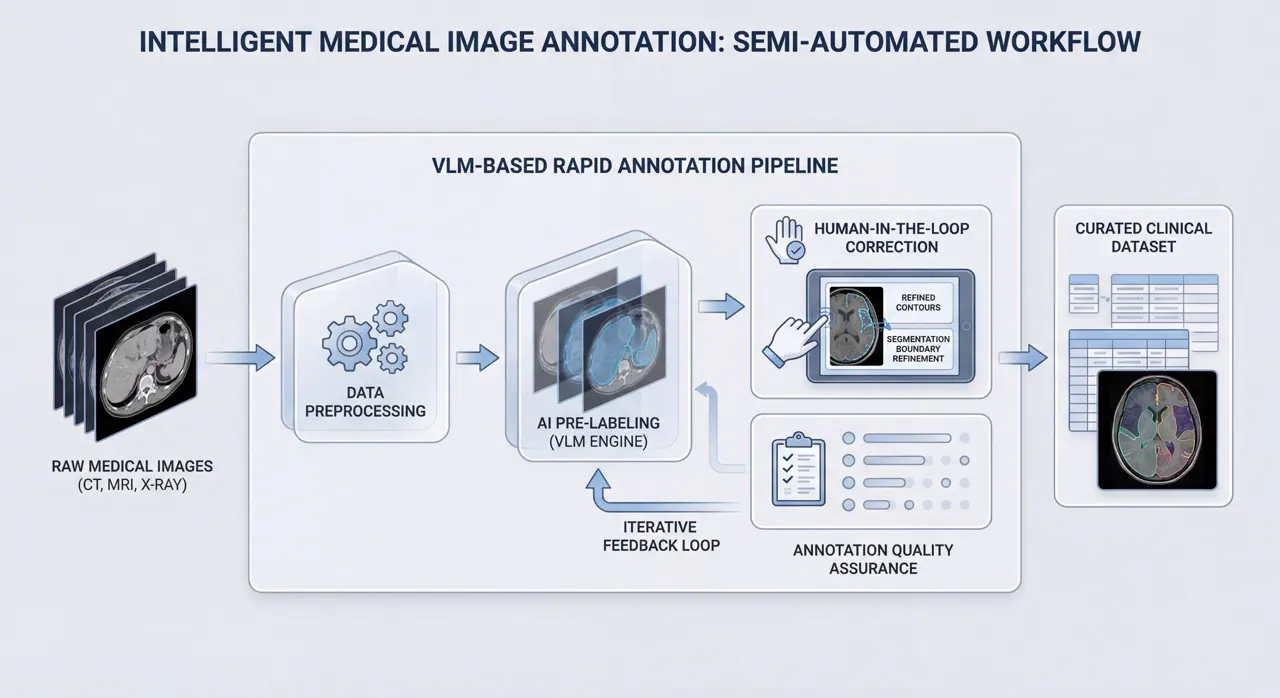
Rapid Medical Image Annotation Tool (VLM-based)
Designed a semi-automated workflow for medical annotation with model pre-labeling, human correction, and iterative data feedback.
- Built a standardized data preprocessing and annotation QA pipeline.
- Constructed and refined an initial dataset from 40+ raw samples.
- Improved boundary consistency through segmentation refinement and manual review.
 Clinical Classification
Clinical Classification
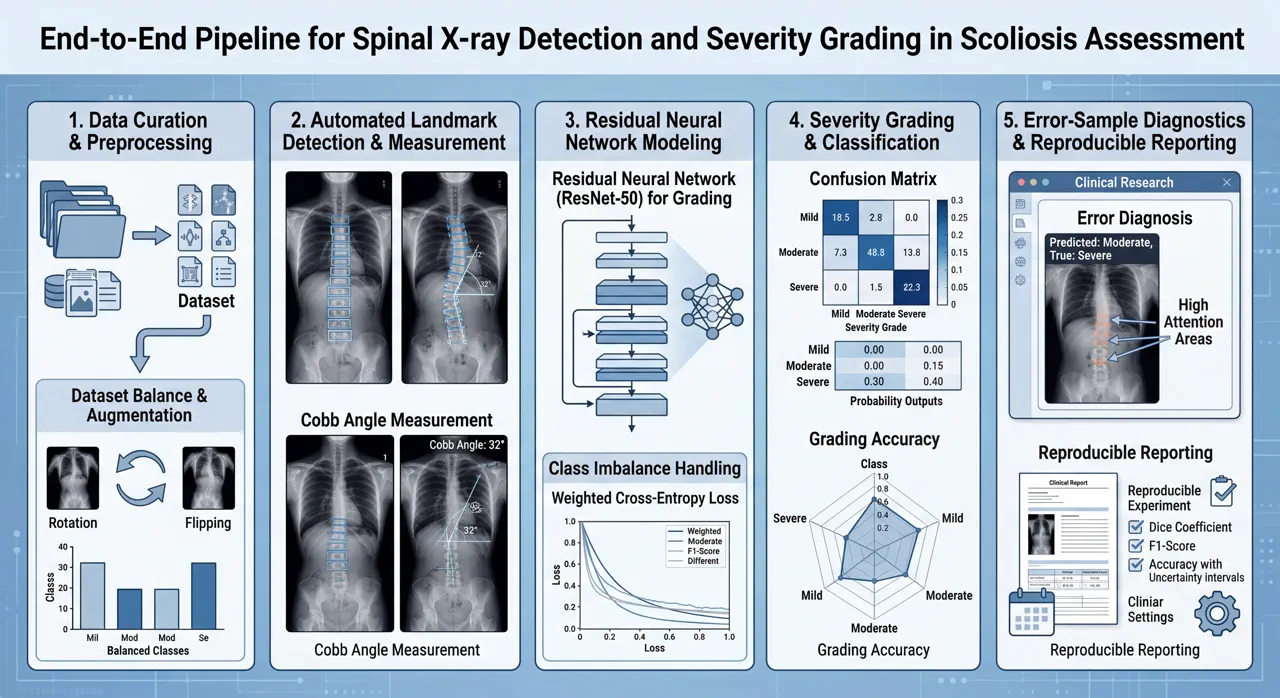
Spinal X-ray Detection and Severity Grading
Implemented an end-to-end pipeline for scoliosis image classification and severity grading, from data curation to model evaluation.
- Integrated residual architecture to improve deep training stability.
- Handled class imbalance and conducted error-sample diagnostics.
- Delivered reproducible grading experiments and analysis reports.
 CAD System
CAD System
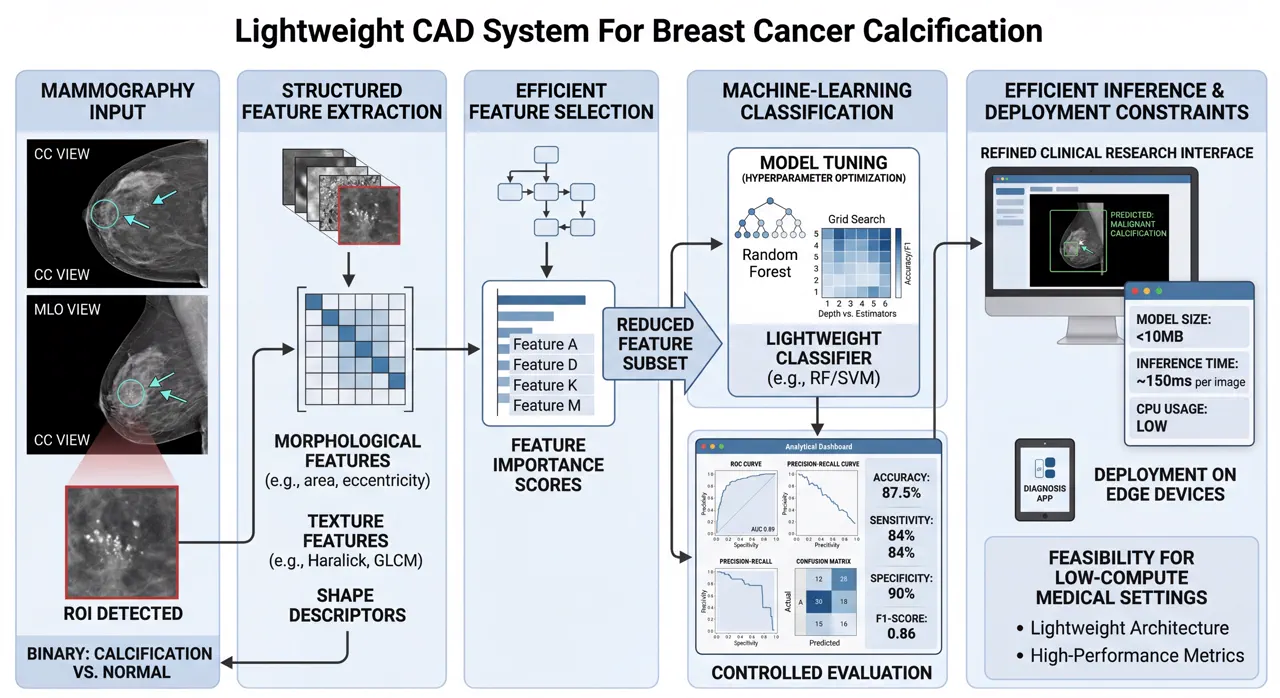
Lightweight Breast Cancer Calcification CAD System
Developed a binary CAD model using structured features and machine-learning methods with deployment constraints in mind.
- Completed feature selection, model tuning, and controlled evaluation.
- Reached 95% classification accuracy with balanced inference efficiency.
- Validated model feasibility for low-compute clinical settings.
 Industrial Vision
Industrial Vision
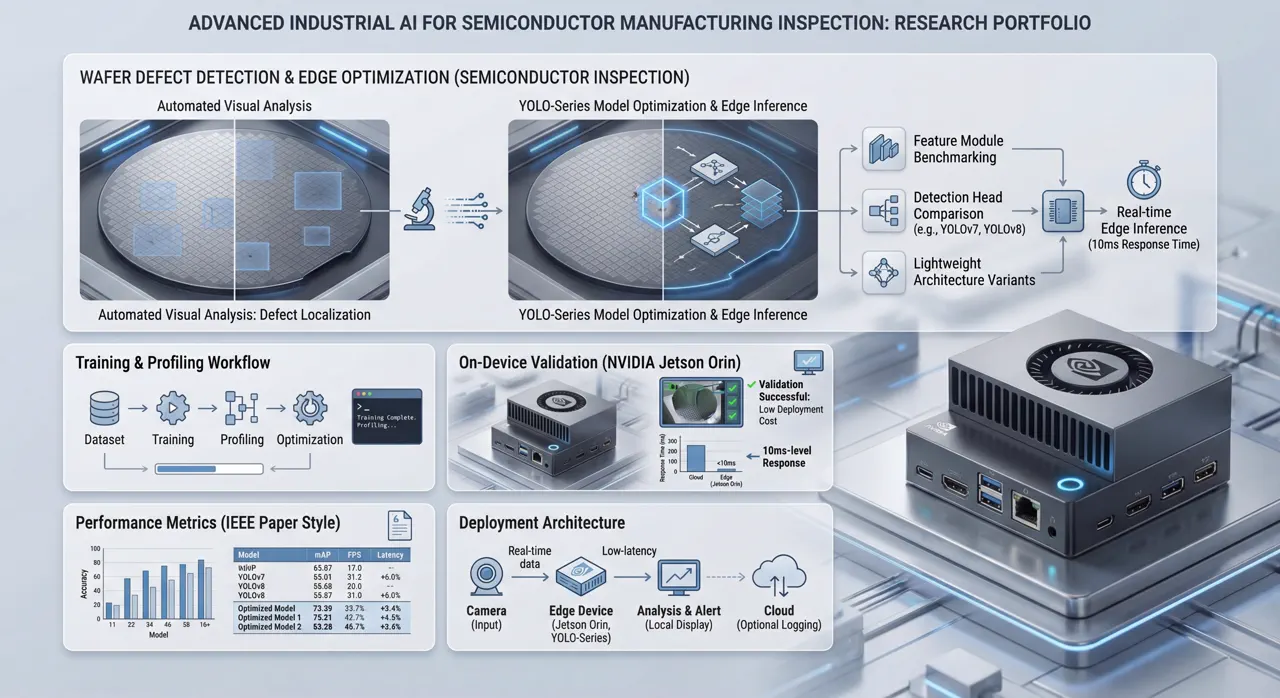
Wafer Defect Detection and Edge Optimization
Optimized YOLO-series architectures for semiconductor defect inspection with a focus on real-time edge inference and deployment cost.
- Benchmarked feature modules, detection heads, and lightweight variants.
- Owned training, profiling, and on-device validation workflows.
- Achieved 10ms-level response on NVIDIA Jetson Orin deployment.
 Robotics
Robotics
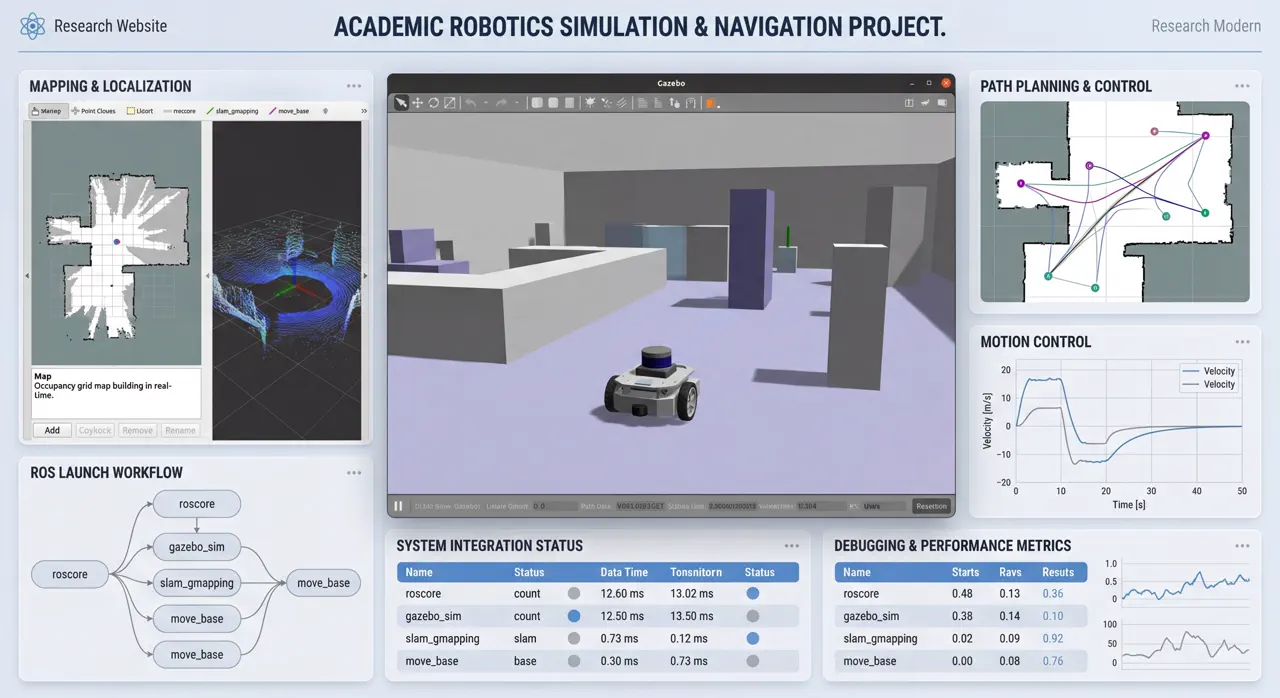
ROS/Gazebo Robot Simulation and Navigation
Built practical robotics workflows in Linux, covering robot simulation, LiDAR-based mapping, localization, and path navigation.
- Implemented point-cloud mapping and environment perception experiments.
- Tuned localization, planning, and motion-control integration steps.
- Worked with ROS `topic` / `launch` mechanisms and debugging routines.
 Assistive Robot
Assistive Robot
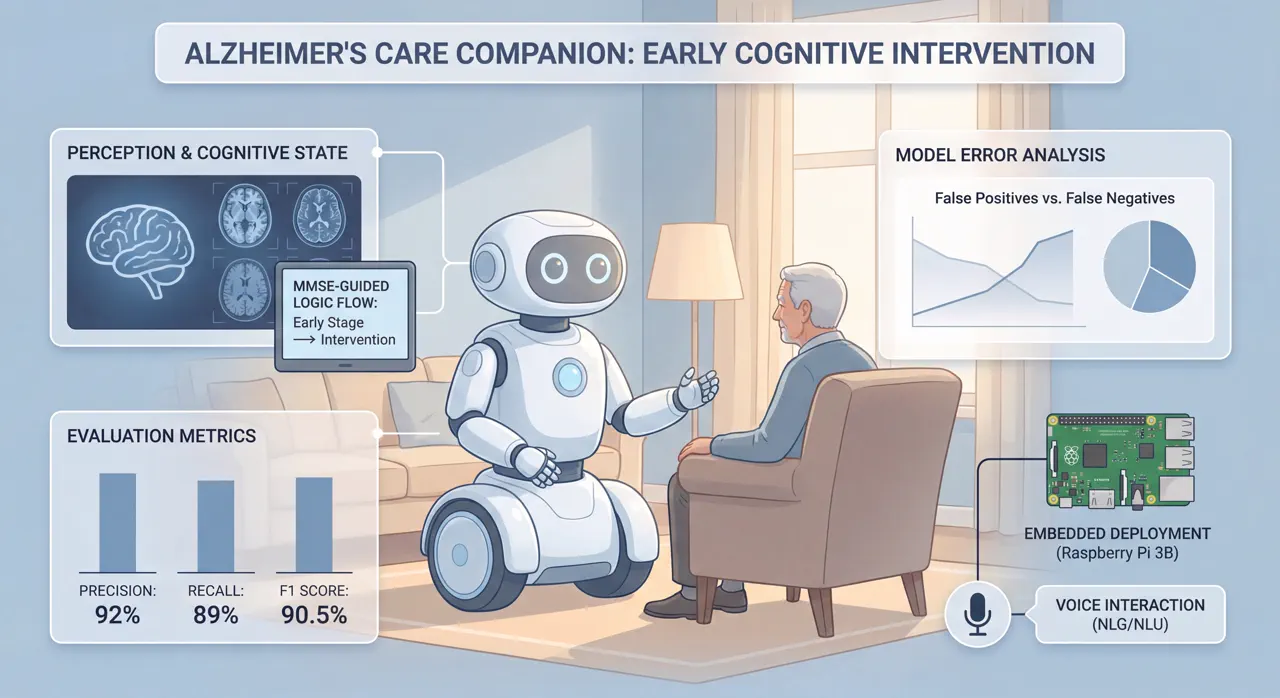
Alzheimer's Care Companion Robot
Contributed to an assistive robot solution for early cognitive intervention, combining perception, voice interaction, and companionship workflows.
- Participated in MRI-based cognitive-state analysis with MMSE-guided logic.
- Tracked Precision / Recall / F1 and supported model error analysis.
- Implemented and integrated voice interaction modules on Raspberry Pi 3B.
 Safety Monitoring
Safety Monitoring
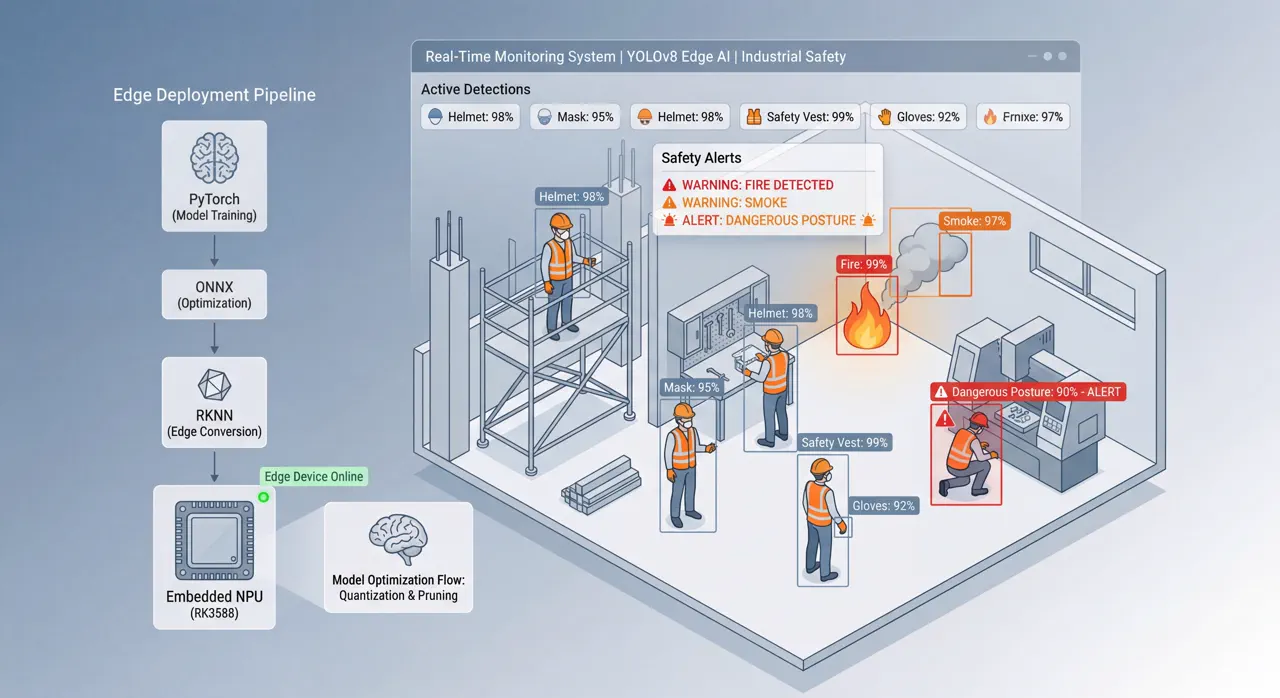
High-Precision Intelligent Monitoring of Industrial Safety Gear Based on YOLOv8
For construction and workshop safety scenarios, built an edge-side monitoring pipeline covering helmets, masks, reflective vests, gloves, smoke/fire cues, and dangerous posture alerts.
- Delivered a full pipeline from data preprocessing and model training to deployment validation.
- Improved multi-class detection accuracy using data augmentation, lightweight architecture replacement, and loss-function optimization.
- Completed model conversion and quantized deployment from PyTorch and ONNX to RKNN for real-time inference and alert linkage.
- Achieved mAP50 of 0.94 in the specified task while balancing accuracy, latency, and deployment practicality.
Classroom Student Segmentation and Stable Tracking Based on SAM
For fixed-camera classroom videos, combined segmentation, detection, and multi-object tracking to maintain persistent identity assignment and trajectory management for each student.
- Used SAM for student region segmentation and integrated YOLO detection for dense-seat localization.
- Introduced temporal association and multi-object tracking to assign unique IDs and reduce ID Switch.
- Handled small motions, partial occlusion, and short leave-return events with seat priors and trajectory recovery.
- Focused on long-video ID stability to improve usability for classroom analytics.
 3D Perception
3D Perception
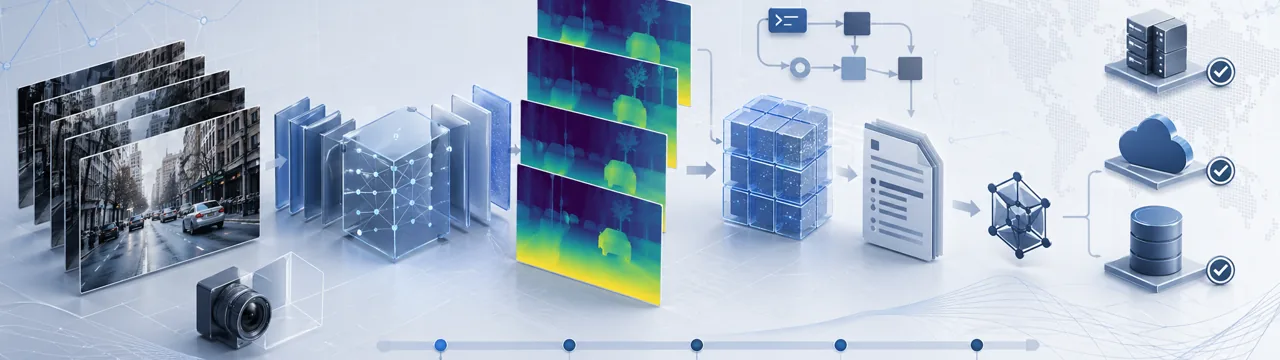
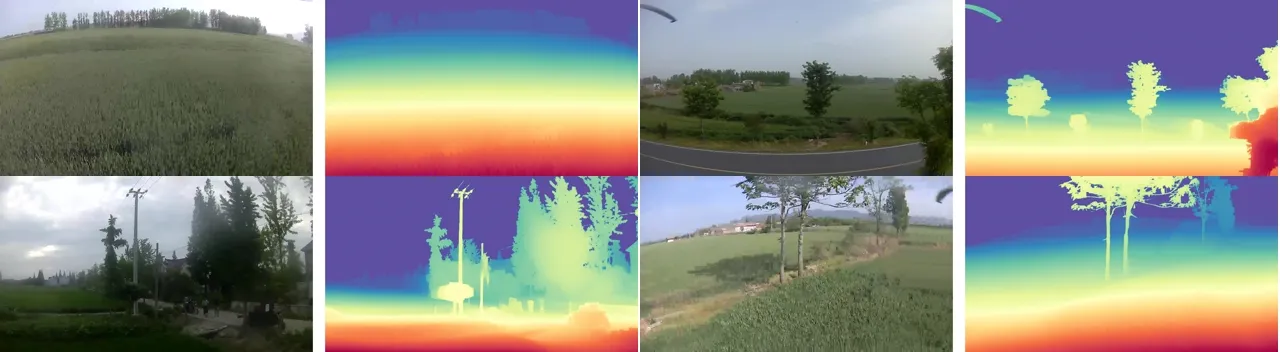
Monocular Depth Estimation and Depth-Field Visualization with Depth Anything
This project focuses on monocular depth estimation and uses Depth Anything to predict scene depth and visualize spatial structure from a single RGB image only. Without stereo cameras, LiDAR, or any additional depth sensors, it recovers relative depth cues and layered spatial relationships in the scene. The work highlights the low-cost, easy-to-deploy, and adaptable nature of monocular perception, providing a practical foundation for robotic perception, scene understanding, and lightweight 3D vision applications.
- Performs depth estimation from a single RGB image, emphasizing the practical value of monocular vision.
- Builds a complete workflow covering image input, model inference, depth generation, and result visualization.
- Expresses scene spatial structure directly without relying on stereo vision or LiDAR.
Creative Stickers
Dawanji Sticker Pack
A high-resolution white-background AI-assisted original sticker pack, showing eight artworks at once.
Full Pack
8 images







Research & Publications
Publications, intellectual property, and deployable systems jointly establish academic credibility.
Selected Publications
- A Bayesian and SVM-based model for compositional analysis and identification of glass artifacts (EI, first author)
- Intelligent monitoring model of wearing industrial safety protective equipment based on YOLOv8 (EI, first author)
- Research on E-commerce Purchase Prediction Model Based on Machine Learning (EI, first author)
- Design and Analysis on U-VLC-CC-CDMA Systems (EI, fifth author)
- New Energy Vehicle High-quality Development (Journal, first author)
- Analysis of Exhibition Modes Based on VR Technology (Journal, first author)
IP & Patents
- IC layout registrations: BS.245520155, BS.255510705
- Design patents: CN307504732S, CN308083643S, CN308095482S
- Utility patents: CN218552339U, CN218602229U, CN221188216U
- Invention patent: CN120451642A
- Software copyrights: 2022SR1148459, 2022SR0828685
Awards, Scholarships & Competitions
Scholarships, academic distinctions, and competition records provide external validation.
Academic Honors
- 2024-2025: Bank of China (Macau) Scholarship
- 2023-2024: National Scholarship, Top 10 University Student, Outstanding Graduate
- 2022-2023: First-Class Scholarship, Outstanding Student, Innovation Scholarship
- 2021-2022: Second-Class Scholarship, Outstanding Student
- 2020-2021: Second-Class Scholarship, Innovation Scholarship
Competition Highlights
- China College Computer Design Competition, National Second Prize (2023)
- National Integrated Circuit Design Competition, Provincial Third Prize (2023)
- Lanqiao Cup, Provincial Third Prize (2023)
- Challenge Cup, Provincial Third Prize (2023)
- Internet+ Innovation Competition, Provincial Bronze (2022)
- MCM/ICM Contest, Successful Participant (S Award, 2021)
Toolchain & Capability Map
The toolkit spans modeling, deployment, robotics, and engineering software used for implementation work.
Technical Skills
- AI/ML: YOLO, machine-learning modeling, medical image analysis, evaluation metrics
- Engineering: ROS/Gazebo, Jetson Orin edge deployment, IC/EDA workflows
- Tools: MATLAB, ModelSim, Quartus Prime, Keil, PSPICE, Altium Designer
- Office & Media: WPS Office, Jianying, OBS, Origin
Certificates
- Industrial and Embedded Development Engineer (Level 1)
- Cross-border E-commerce Specialist
- New Media Operator
Collaboration & Contact
The primary email is the preferred contact for research collaboration, internships, and technical conversations. Other channels remain available as supporting contacts and public profiles.